控制系统的数学模型
描述系统输入输出变量以及内部各变量之间关系的数学表达式。
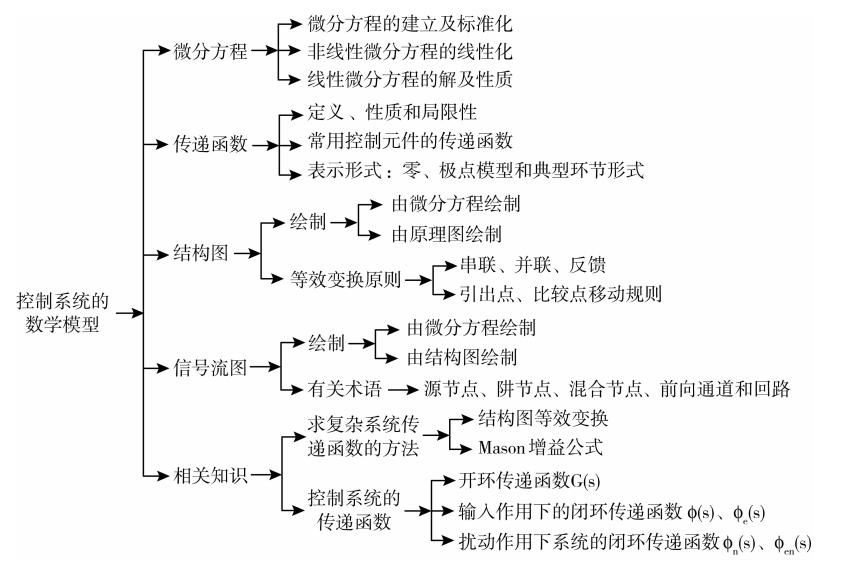
一、控制系统数学模型的分类(动态)
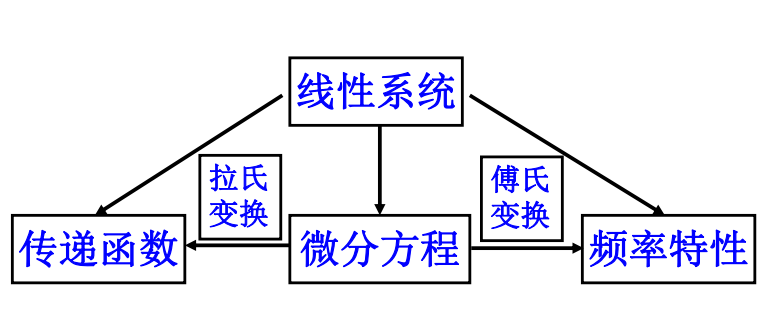
时域:微分方程、差分方程、状态空间表达式 复域:传递函数、动态结构图、信号流图 频域:频率特性
表达形式如下图:
二、控制系统微分方程的建立
2.1 步骤
- 确定系统的输入、输出变量。
- 根据已知的物理或化学定律,写出运动过程的微分方程。
- 消去中间变量,写出输入、输出变量的微分方程。
- 整理,与输入有关的放在等号右面,与输出有关的放在等号左面,并按照降阶次进行排列。
2.2 举例
如图所示的

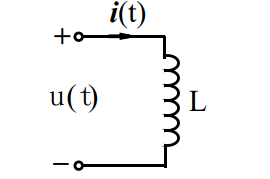
首先我们需要具备几个基本知识:
电阻、电容、电感数学模型的微分表达:
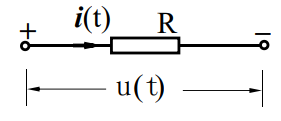 | ||
|---|---|---|
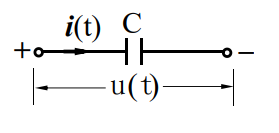 | ||
 |
则由基尔霍夫定律有
对
进行两边求导有:
联立消除中间变量得到方程: