经典控制理论的一般概念
一、基本概念
自动控制:是指在没有人直接参与的情况下,利用自动控制装置(简称控制器) 使机器、设备或生产过程(称为被控对象)的某个工作状态或参数(称为被控量)自动地按照预定的规律进行。
自动控制系统:是指能够对被控对象的工作状态进行自动控制的系统。一般由控制装置和被控对象组成。
被控制对象:是指那些要求实现自动控制的机器、设备或生产过程。
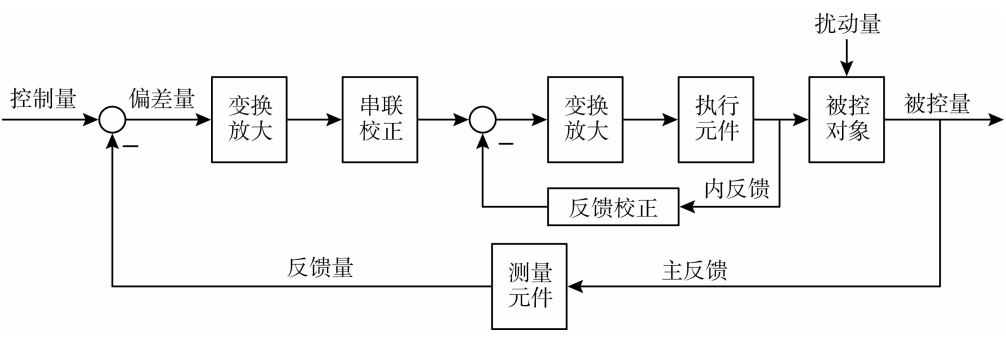
控制装置:是指对被控对象起控制作用的设备总体。控制装置又可分为下列几个部分:
- 测量元件(或测量装置):用于测量被控量的实际值或对被控量进行物理量变换的装置。
- 比较元件(或比较器):它将被控量的实际值(常取负号)与被控量的要求值(常取正号)相比较,得到偏差的大小和符号。
- 调节元件:通常包括放大器和校正装置。它能将偏差信号放大,并使输出控制信号与偏差信号之间具有一定的数值运算关系(也称为调节规律或控制算法)。
- 执行元件:接受调节元件的输出控制信号,产生具体的控制效果,使被控制量产生预期的改变。
其中测量元件、比较元件和执行元件是控制装置中必不可少的。
自动控制系统的变量:
- 输入信号(给定值,参考信号):系统输出信号期望达到的数值或者与期望值对应物理量纲的值。
- 输出信号(被控量)表征控制对象运动规律或者状态的物理量
- 干扰信号(扰动):使系统输出量偏离期望值的信号
- 控制信号:控制器生成,作用在被控对象上的信号
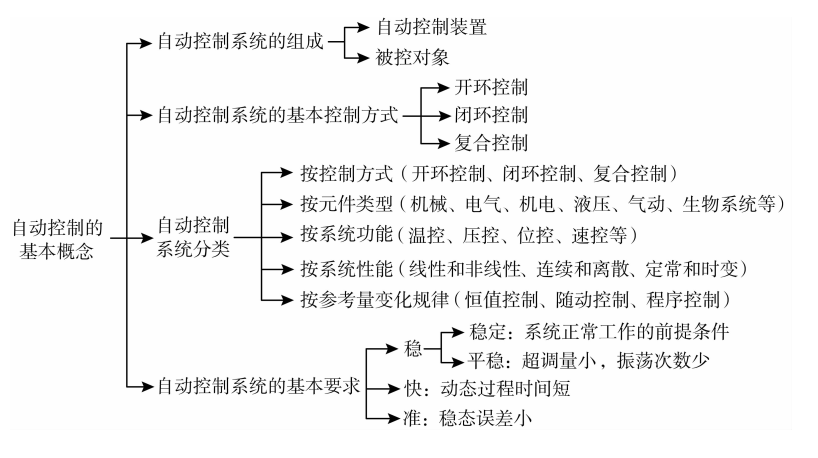
自动控制的基本方式:开环控制 、闭环控制、复合控制
二、闭环控制术语
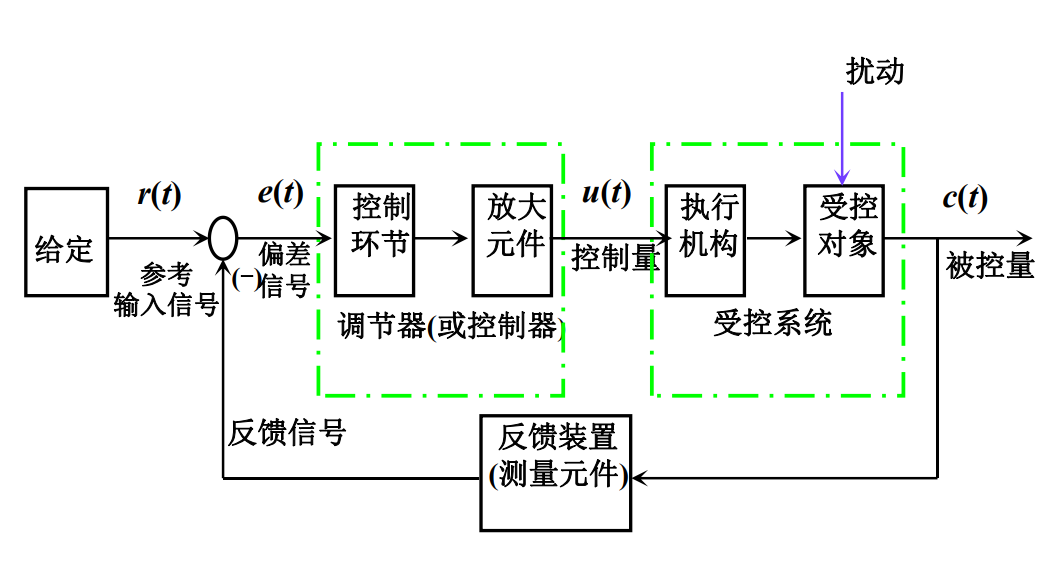
反馈控制系统的一般组成如下面两图所示(可以对比着看):
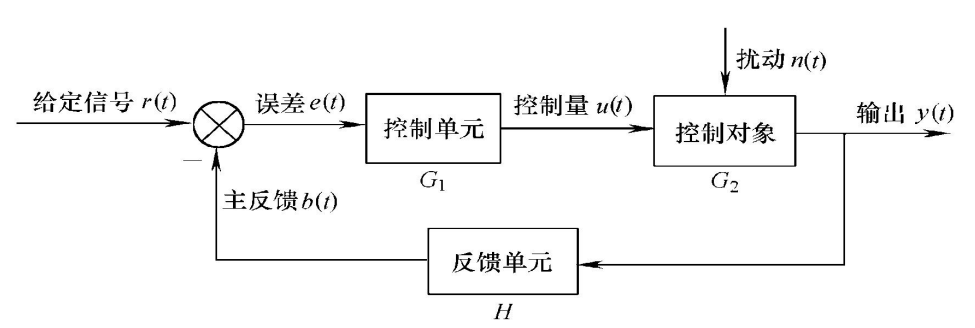
相关术语:
- 测量元件: 测量被控量
- 主反馈: 与输出成正比或某种函数关系,但量纲与给定信号相同;
- 偏 差: 给定信号与主反馈信号之差的信号;
- 控制单元: 接受偏差信号,通过转换与运算,产生期望的控制量;
- 扰 动: 对系统输出产生不利影响的信号;
- 反馈环节: 检测输出信号并转换与给定输入信号相同量纲的信号。
- 给定信号: 输入到控制系统中的指令信号;
- 控制量u: 从控制器输出并作用于被控制对象的信号;
- 输出c:反馈控制系统的被控制量,即被控制对象的输出量;
- 比较环节:将参考输入与主反馈信号进行比较的环节, 它的输出等于参考输入与主反馈信号的差值即偏差e,比较环节又称为偏差检测器。
- 控制对象:被控制的机器,设备,过程或系统
三、控制系统的分类
自动控制系统有多种分类方法。例如:按控制方式、按元件类型、按系统功用、按系统性能、按参 考量变化规律等,常见分类如下:
| 分类依据 | 类别1 | 类别2 | 类别3 |
|---|---|---|---|
| 控制方式 | 开环控制 | 闭环控制 | 复合控制 |
| 按参考输入形式 | 恒值系统 | 随动系统 | 程序控制系统 |
| 照系统内信号的传递形式 | 连续系统 | 离散系统 | |
| 按组成系统的元件特性 | 线性系统 | 非线性系统 | |
| 输入输出系统信号的数量 | 单输入-单输出系统SISO | 和多输入-多输出系统MIMO | |
| 按照控制系统的结构、参数 | 定常系统/时不变系统 | 时变系统 |
四、控制系统基本要求
稳:要求系统稳定(被控制信号能跟踪已变化的输入信号)
稳定性是保证系统正常工作的先决条件;平稳性是对动态响应过程的评价,主要指标包括超调量以及振荡次数等。
准:稳态性能, 要求准确,输出跟随精度高.
准确性是指在理想情况下,当过渡过程结束后,被控量达到的稳态值(即平衡状态)应与期望值一致。主要指标是稳态误差。
快:暂态性能,要求快速平稳收敛.
快速性也是对系统动态响应过程的评价,主要指标包括系统的过渡时间、上升时间、峰值时间等。
[! tip] 这是一个提示框,用于提供建议或技巧。